PowerPoint Presentation
|
|
|
- Loukya Deshmukh
- 3 साल पहले
- दृश्य:
प्रतिलिपि
1 Law Of Motion By Saurabh sir
2

3
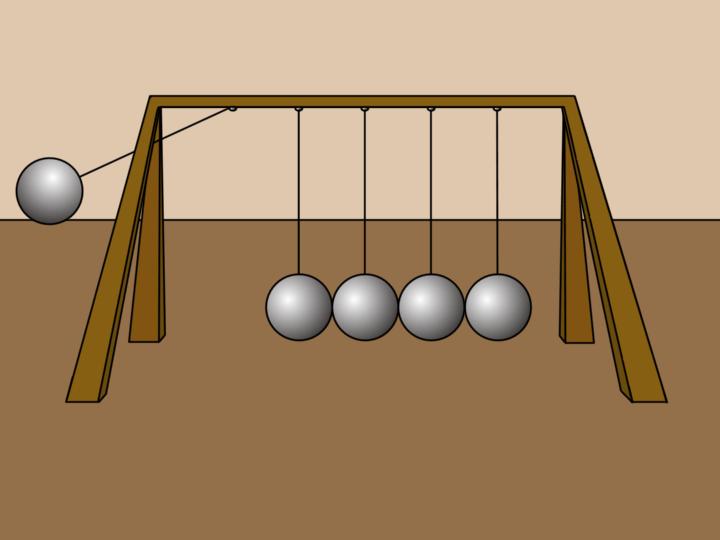
4 1. FIRST LAW OF MOTION According to this law, every body continues in its state of rest or motion in a straight line unless it is compelled by external force to change that state. (i) This law is also called law of inertia. Inertia is a virtue by which a body opposes the state of rest or motion. (ii)force is such a factor, which is essential for change in translatory motion of a body. (iii)the first law of motion defines the force.
5 1.म शन क पहल ननयमइस क न न क अन स र, प रत य क शर र एक स ध र ख म अपन आर म य गन क स थ न म रह ह जब क कक उस स थ न क बदलन क ललए ब हर बल द व र मजब र नह ककय ज ह (i)इस क न न क जड क क न न भ कह ज ह जड एक ग ण ह स जसक द व र एक शर र आर म य गन क स थ न क ववर ध कर ह (ii)बल एक ऐस क रक ह, ज ककस ननक य क ललप य रण गन म पररव तन क ललए आवश यक ह (iii)गन क पहल ननयम बल क पररभ व कर ह
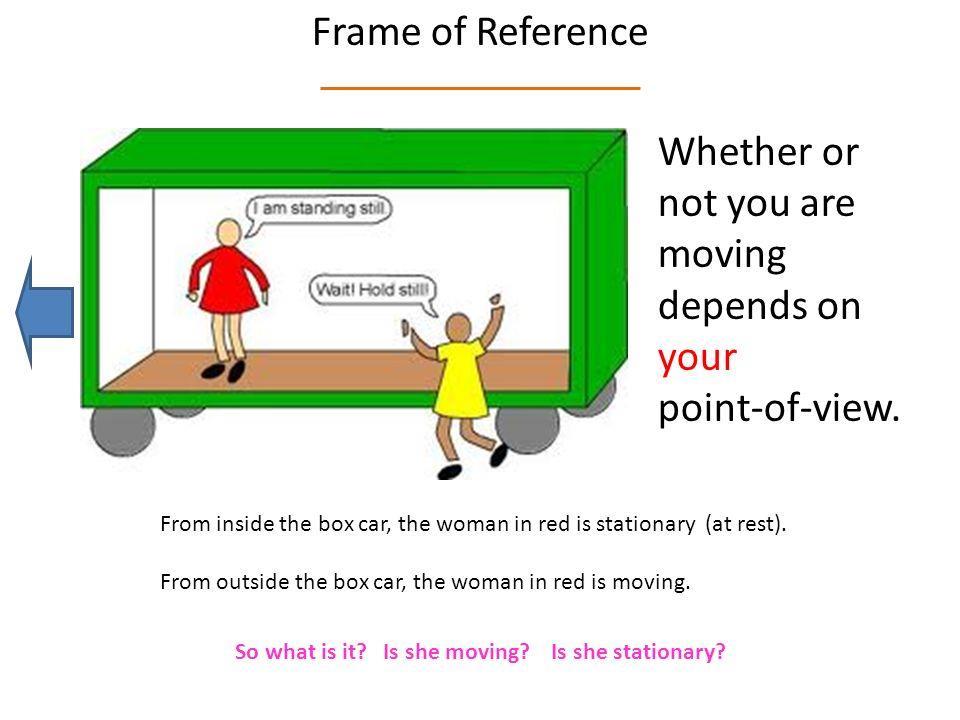
6
7 2. SECOND LAW OF MOTION According to this law, the rate of change of momentum (mass velocity) of a body is proportional to the impressed force and it takes place in the direction of the force. Mathematically, F dp dt F = k dp dt F = m dv dt F = ma

 क ररवर तन क दर प")

8 2. म शन क द सर ननयम इस क न न क अन स र, ककस प ड क स व ग (म स व ग) क ररवर तन क दर प रभ पवर बल क सम न र ह र ह और यह बल क ददश म ह र ह

9 3. THIRD LAW OF MOTION According to this law, 'Every action has its equal and opposite reaction" 3. म शन क र सर ननयम इस क न न क अन स र, 'प रत य क क य क अ न सम न और पव र र प रनर क य ह र ह "
10
11 Impulse:- If a force acts on a body for a short duration Dt, then impulse is defined as product of force and its time of action Impulse= Force Duration I=F t I= P t t

12 आव ग: - यदद क ई बल ककस छ ट अवध क ललए ककस ननक य र क यत करर ह, र आव ग क बल क उत द और उसक क य क समय क र म ररभ प र ककय ज र ह
13 REFERENCE FRAMES Whenever the observer is situated in space that is called the frame of reference. The reference frame is associated with a coordinate system and a clock to measure the position and of the events happening in space. जब भ यतव क षक अ र ररक ष म स थ र ह र ह स जस स दभत क फ र म कह ज र ह स दभत फ र म एक समन वय प रण ल और एक घड क स ज ड ह आ ह ज स थ नर और अ र ररक ष म ह न व ल घटन ओ क म न क ललए ह
14
15 TYPES OF REFERENCE FRAME a) Inertial frame of reference b) Non-inertial frames of reference
16
17 MOTION IN A LIFT Weight :-The pull of earth on any body under its gravitational influence is called the weight of the body. This force is directed towards the centre of the earth. This force produces an acceleration on the body called the acceleration due to gravity W=mg भ र: -इसक ग र त व क तण प रभ व क र हर ककस भ प ड र थ व क ख चन क कह ज र ह शर र क वजन यह बल थ व क क द र क ओर ननद लशर ह र ह यह बल ग र त व क तण क क रण त वरण न मक शर र र त वरण द करर ह


18 If the lift is accelerated upward R = mg + ma If the lift is unaccelerated R = mg If the lift is accelerated downward R = mg ma

19 While upward motion you feel heavy weight while moving downward same weight feels less
20 MOTION OF A BLOCK ON A HORIZONTAL SMOOTH SURFACE a) When subjected to a horizontal pull When subjected to a horizontal pull R = mg F = ma
21 b) When subjected to a pull acting at an angle (q) to the horizontal R = mg F sinθ F cosθ= ma
 R = mg + F sinθ F cosθ =")
22 c) When the block is subjected to a push acting at an angle q to the horizontal : (downward) R = mg + F sinθ F cosθ = ma
23 MOTION OF BODIES IN CONTACT a) Two body system f = m 1F M 1 + M 2 F = m 1 + m 2 a
24 F f = m 1 a f = m 2 a F=f+m 1 a

25 b) Three body system:-
26 F f 1 = m 1 a f 1 f 2 = m 2 a f 2 =m 3 a
27 MOTION OF CONNECTED BODIES a) For Two Bodies R 2 = m 2 g T=m 2 a R 1 = m 1 g F-T=m 1 a
28 2) For Three bodies F=(m 1 + m 2 + m 3 )a
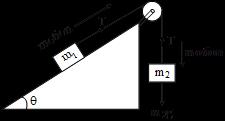
29 MOTION OF A BODY ON A SMOOTH INCLINED PLANE ma = mgsinθ Therefore, a=gsinθ R=mgCosθ
30 R 1 = m 1 g T 1 = m 1 a R 2 = m 2 g T 2 T 1 = m 2 a R 3 = m 3 g F T 2 = m 3 a

31 MOTION OF TWO BODIES CONNECTED BY A STRING a) Motion of unequal masses suspended from a light frictionless pulley:- For the motion of A T = m a + m g 1 1 For the motion of B T = m 2 g m 2 a


32 b) m 2 g T = m 2 a T=m 1 a
33
34 m 1 a = T m 1 gsinθ T = m 2 g m 2 a
35
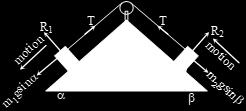
36 m 1 a = m 1 gsinα T m 2 a = T m 2 gsinβ

37 FRICTION AND FRICTIONAL FORCE If we slide or try to slide a body over a surface the motion is resisted by a bonding between the body and the surface. This resistance is represented by a single force and is called friction अगर हम ककस सर ह र ककस ब ड क थल इड य थल इड करन क प रय स करर ह र गनर क पवर शर र और सर ह क ब च क स ब स ह र ह इस प रनर र क एक बल द व र दश तय ज र ह और इस घ तण कह ज र ह
38 a) Friction is a non conservative force, i.e. work done against friction is path dependent. b) In its presence mechanical energy is not conserved. Thus friction reduces efficiency of a machine. c) Normally with increase in smoothness friction decreases. But if the surface area are made too smooth by polishing and cleaning the bonding force of adhesion will increase and so the friction will increase resulting in 'Cold welding'
39 a) घ तण एक ग र र द व द शस तर ह, अ तर घ तण क पवर द ककय गय क यत र ननभतर ह ब ) इसक उ स थ नर म य त र क ऊज त स रक षक षर नह ह इस प रक र घ तण एक मश न क दक षर कम कर द र ह c) स म न य र स धचकन ई ब न स घ तण कमह ज र ह ल ककन अगर सर ह क ष क ललश करक बह र धचकन बन य ज र ह और आस जन क ब न बल म व द ध ह ग और इसललए घ तण ब ग स जसक ररण मथवर 'क ल ड व स ल ड ग' ह ग
40 There are three types of frictional force a) Static friction b) Dynamic friction & Sliding friction c) Rolling friction

41 a) The frictional force which is effective before motion starts between two planes in contact with each other, is known as static friction. Static friction is a self adjusting force with an upper limit, called limiting friction. The maximum force of static friction upto which body does not move is called limiting friction (fl)

42 If the applied force is increased further and sets the body in motion, the friction opposing the motion is called dynamic or kinetic friction. Kinetic friction is lesser than limiting friction. we require more force to start a motion than to maintain it against friction

43 When a body (say wheel) rolls on a surface the resistance offered by the surface is called rolling friction. In rolling the surfaces at contact do not rub each other. The velocity of point of contact with respect to the surface remains zero all the time although the centre of the wheel moves forward.
 tan = f N = μn N")
44 ANGLE OF FRICTION (f) tan = f N = μn N = μ

45 The angle of repose:- minimum angle of inclination of the inclined plane at which a body placed at rest on the inclined plane is about to slide down in equilibrium condition.




46 F = u dm dt mg
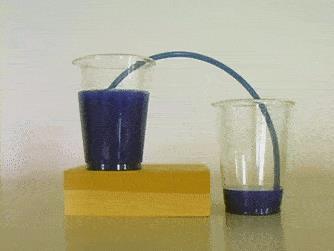
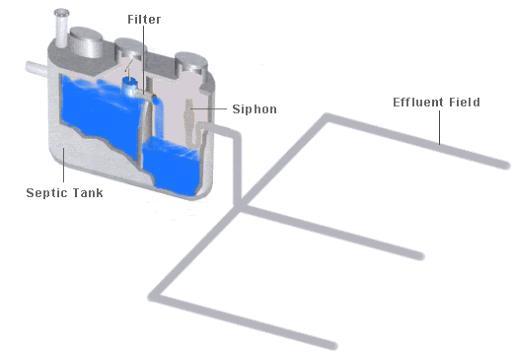
47 Siphon A tube used to convey liquid upwards from a reservoir and then down to a lower level of its own accord. Once the liquid has been forced into the tube, typically by suction or immersion, flow continues unaided. The Banu Musa a) Acceleration brothers & momentum of 9th-century Baghdad invented Q.5) During projectile motion the properties that remains unchanged b) Acceleration and Kinetic energy c) Acceleration and horizontal velocity d) Force and vertical velocity
48
49
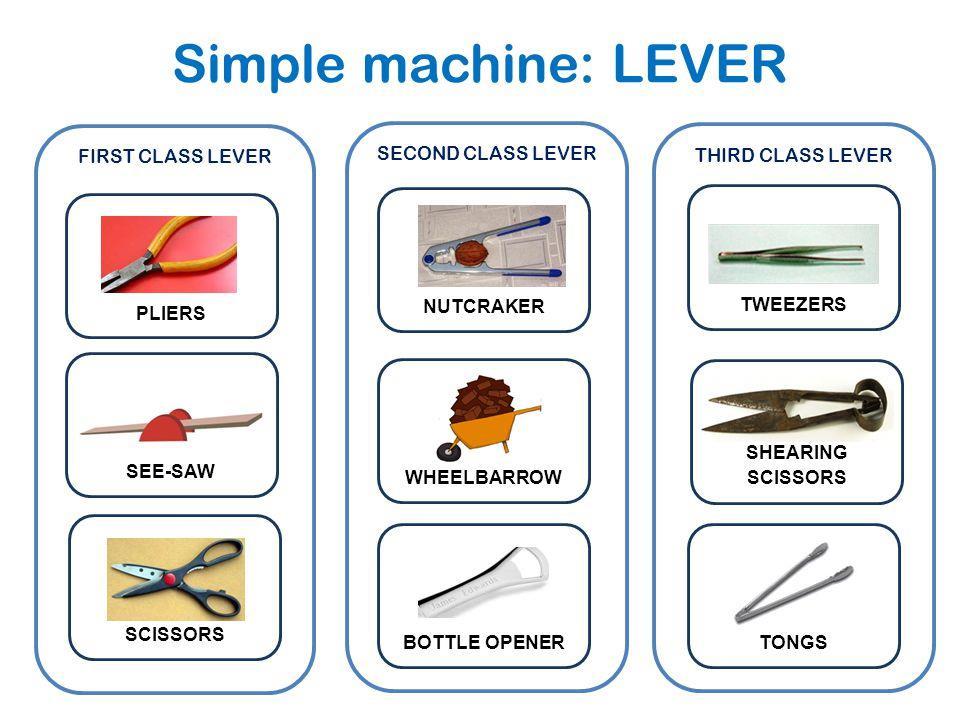
50 Levers is a simple machine consisting of a beam or rigid rod pivoted at a fixed hinge, or fulcrum. A lever is a rigid body capable of rotating on a point on itself. On the basis of the locations of fulcrum, load and effort, the lever is divided into three types. a) first class b) second class c) third class
51
52
53


54 Hydrometer:-an instrument for measuring the density of liquids. It was discovered by Nicholson in 1790.
Using a Walker - Hindi
 व कर क इस त म ल करन Using a Walker Walking with a walker 1. Lift the walker and place it at a comfortable distance in front of you with all four of its legs on the floor. This distance is often equal to
व कर क इस त म ल करन Using a Walker Walking with a walker 1. Lift the walker and place it at a comfortable distance in front of you with all four of its legs on the floor. This distance is often equal to
PowerPoint Presentation
 Part 5( Article 52-151) Parliament Parliament consists of the President of India, Lok Sabha and Rajya Sabha. Normally, three Sessions of Parliament are held in a year: (i) Budget Session (February-May)
Part 5( Article 52-151) Parliament Parliament consists of the President of India, Lok Sabha and Rajya Sabha. Normally, three Sessions of Parliament are held in a year: (i) Budget Session (February-May)
PowerPoint Presentation
 The Vice-President Of India (Articles 63-73) Part V of the Constitution of India under Chapter I (Executive) discusses about the office of the Vice-President of India. The Vice-President of India is the
The Vice-President Of India (Articles 63-73) Part V of the Constitution of India under Chapter I (Executive) discusses about the office of the Vice-President of India. The Vice-President of India is the
Microsoft Word - Recruitment
 Bihar School Examination Board बह र व लय पर स म त User Manual For Recruitment (Contract Basis) मह वप ण त थय म स य ववरण त थ 1 ऑनल इन आव दन और श क जम करन क त थ 03.01.2017 12.01.2017 Email ID: recruitment.bseb@gmail.com
Bihar School Examination Board बह र व लय पर स म त User Manual For Recruitment (Contract Basis) मह वप ण त थय म स य ववरण त थ 1 ऑनल इन आव दन और श क जम करन क त थ 03.01.2017 12.01.2017 Email ID: recruitment.bseb@gmail.com
11_0549_02_2017_ indd
 Cambridge International Examinations Cambridge International General Certificate of Secondary Education *6695939798* HINDI AS A SECOND LANGUAGE 0549/02 Paper 2 Listening October/November 2017 Approx. 35
Cambridge International Examinations Cambridge International General Certificate of Secondary Education *6695939798* HINDI AS A SECOND LANGUAGE 0549/02 Paper 2 Listening October/November 2017 Approx. 35
03_0549_01_2017_ indd
 Cambridge International Examinations Cambridge International General Certificate of Secondary Education *0084715162* HINDI AS A SECOND LANGUAGE 0549/01 Paper 1 Reading and Writing February/March 2017 2
Cambridge International Examinations Cambridge International General Certificate of Secondary Education *0084715162* HINDI AS A SECOND LANGUAGE 0549/01 Paper 1 Reading and Writing February/March 2017 2
PowerPoint Presentation
 GDP, NDP, GNP, NNP The money value of all the final goods and services produced in the domestic territory of a country in a year s time is called the Gross Domestic Product. The domestic territory includes
GDP, NDP, GNP, NNP The money value of all the final goods and services produced in the domestic territory of a country in a year s time is called the Gross Domestic Product. The domestic territory includes
_2018 puzzle pdf hindi.xps
 SUCCESSKEY98 FOR PDF : www.successkey98.in FOR MOCK TEST : www.successkey98.org TELEGRAM LINK https://bit.ly/2pbwlc9 HIGH LEVEL PUZZLE FOR IBPS PO AND IBPS CLERK PRELIMS 2018 EXPECTED PUZZLE PDF IN HINDI
SUCCESSKEY98 FOR PDF : www.successkey98.in FOR MOCK TEST : www.successkey98.org TELEGRAM LINK https://bit.ly/2pbwlc9 HIGH LEVEL PUZZLE FOR IBPS PO AND IBPS CLERK PRELIMS 2018 EXPECTED PUZZLE PDF IN HINDI
50 Important Questions of Periodic Table [1 ]
![50 Important Questions of Periodic Table [1 ]](/thumbs/99/140887773.jpg "50 Important Questions of Periodic Table [1 ]") 50 Important Questions of Periodic Table 12.04.2019 [1 ] 1) Mendeleev initially selected two elements to study the properties of the other elements named, as म डल व श र म न ममत अन य तत व क ग ण क अध ययन
50 Important Questions of Periodic Table 12.04.2019 [1 ] 1) Mendeleev initially selected two elements to study the properties of the other elements named, as म डल व श र म न ममत अन य तत व क ग ण क अध ययन
To No.M-11014/2(45)/ /MSS(IM) Government of India Ministry of Textiles Office of Development Commissioner (Handicrafts) Block No.7, R.K.Puram Ne
/ /MSS(IM) Government of India Ministry of Textiles Office of Development Commissioner (Handicrafts) Block No.7, R.K.Puram Ne") To No.M-11014/2(45)/2016-17/MSS(IM) Government of India Ministry of Textiles Office of Development Commissioner (Handicrafts) Block No.7, R.K.Puram New Delhi-110066 Dated: - 30. 10. 2017 The Regional Director
To No.M-11014/2(45)/2016-17/MSS(IM) Government of India Ministry of Textiles Office of Development Commissioner (Handicrafts) Block No.7, R.K.Puram New Delhi-110066 Dated: - 30. 10. 2017 The Regional Director
ग प ल र ज क प स तक म त र जपक रहस य क स र-स क ष प म नसश र ग प ल र ज 30, ससव ल ल ईन स, र ड़क स ष ट स पहल जब क छ भ नह थ
 ग प ल र ज क प स तक म त र जपक रहस य क स र-स क ष प म नसश र ग प ल र ज www.bestastrologer4u.com 30, ससव ल ल ईन स, र ड़क - 247 667 स ष ट स पहल जब क छ भ नह थ तब श न य म ह एक ध नन म त र ह त थ ह ध नन अथ न द थ ओऽम
ग प ल र ज क प स तक म त र जपक रहस य क स र-स क ष प म नसश र ग प ल र ज www.bestastrologer4u.com 30, ससव ल ल ईन स, र ड़क - 247 667 स ष ट स पहल जब क छ भ नह थ तब श न य म ह एक ध नन म त र ह त थ ह ध नन अथ न द थ ओऽम
PowerPoint Presentation
 Total 450 voucher were distributed by a salon for complimentary haircut and pedicure. number of vouchers redeemed by male were 134 more than that of female. The ratio of voucher for pedicure by males to
Total 450 voucher were distributed by a salon for complimentary haircut and pedicure. number of vouchers redeemed by male were 134 more than that of female. The ratio of voucher for pedicure by males to
Process of filling Application Form 1. First of all download and read carefully the Application Brochure from website. lcls igys osclkbv ij fn;s Appli
 Process of filling Application Form 1. First of all download and read carefully the Application Brochure from website. lcls igys osclkbv ij fn;s Application Brochure ij fdyd dj vkosnu funszf kdk dks MkmuyksM
Process of filling Application Form 1. First of all download and read carefully the Application Brochure from website. lcls igys osclkbv ij fn;s Application Brochure ij fdyd dj vkosnu funszf kdk dks MkmuyksM
Microsoft Word gi
 jftlvªh laö Mhö,yö&33004@99 REGD. NO. D. L.-33004/99 vlk/kj.k EXTRAORDINARY Hkkx II [k.m 3 mi&[k.m (ii) PART II Section 3 Sub-section (ii) izkf/dkj ls izdkf'kr PUBLISHED BY AUTHORITY la- 5005] ubz fnyyh]
jftlvªh laö Mhö,yö&33004@99 REGD. NO. D. L.-33004/99 vlk/kj.k EXTRAORDINARY Hkkx II [k.m 3 mi&[k.m (ii) PART II Section 3 Sub-section (ii) izkf/dkj ls izdkf'kr PUBLISHED BY AUTHORITY la- 5005] ubz fnyyh]
उ तर द श श सन क म क अन भ ग-1 स य -1/2016/13/2/1997-क लखनऊ :: दन क 17 फरवर, 2016 अ धस चन क ण स वध न क अन छ द, 309 क पर त क र द त श क य ग करक, र
 उ तर द श श सन क म क अन भ ग-1 स य -1/2016/13/2/1997-क -1-2016 लखनऊ :: दन क 17 फरवर, 2016 अ धस चन क ण स वध न क अन छ द, 309 क पर त क र द त श क य ग करक, र यप ल, ''उ तर द श सरक र स वक प रव नयम वल, 2013'' म
उ तर द श श सन क म क अन भ ग-1 स य -1/2016/13/2/1997-क -1-2016 लखनऊ :: दन क 17 फरवर, 2016 अ धस चन क ण स वध न क अन छ द, 309 क पर त क र द त श क य ग करक, र यप ल, ''उ तर द श सरक र स वक प रव नयम वल, 2013'' म
म त -प त क ल ए प रश न और उत तर ग र ड 6 1. ग र ड 6 क आक न क ल ए क य र क ष ज त ह? ग र ड 6 आकलन व द य र थ य क पढ न, ललखन और गण त स ब ध उस क शल क म लय कन
 म त -प त क ल ए प रश न और उत तर ग र ड 6 1. ग र ड 6 क आक न क ल ए क य र क ष ज त ह? ग र ड 6 आकलन व द य र थ य क पढ न, ललखन और गण त स ब ध उस क शल क म लय कन करत ह ज सक ललए व द य र थ य स अप क ष क त ह कक ओ ट ररय
म त -प त क ल ए प रश न और उत तर ग र ड 6 1. ग र ड 6 क आक न क ल ए क य र क ष ज त ह? ग र ड 6 आकलन व द य र थ य क पढ न, ललखन और गण त स ब ध उस क शल क म लय कन करत ह ज सक ललए व द य र थ य स अप क ष क त ह कक ओ ट ररय
Successkey98 Directions (1-3): Study the following information carefully and answer the given questions. Amongst five friends, A, B, C, D, E, each got
: Study the following information carefully and answer the given questions. Amongst five friends, A, B, C, D, E, each got") Successkey98 Directions (1-3): Study the following information carefully and answer the given questions. Amongst five friends, A, B, C, D, E, each got different marks in the examination. A scored more
Successkey98 Directions (1-3): Study the following information carefully and answer the given questions. Amongst five friends, A, B, C, D, E, each got different marks in the examination. A scored more
भ रत क र ष ट रपतत श र र म न थ क व न द ज क ऊज स रक षण प रस क र और प ट ग प रततय गगत प रस क र प रद न करन क अ सर पर अभभभ षण नई टदल ल : 14 टदसम बर,
 भ रत क र ष ट रपतत श र र म न थ क व न द ज क ऊज स रक षण प रस क र और प ट ग प रततय गगत प रस क र प रद न करन क अ सर पर अभभभ षण नई टदल ल : 14 टदसम बर, 2017 1. ऊज स रक षण टद स क अवसर पर आप सबक स ब ध त करत ह ए म
भ रत क र ष ट रपतत श र र म न थ क व न द ज क ऊज स रक षण प रस क र और प ट ग प रततय गगत प रस क र प रद न करन क अ सर पर अभभभ षण नई टदल ल : 14 टदसम बर, 2017 1. ऊज स रक षण टद स क अवसर पर आप सबक स ब ध त करत ह ए म
Python एक शुरुआत सीबीएसई पाठ्यक्रम पर आधारित कक्षा -11
 Data Structures-I Linear Lists स ब एसई प ठ यक रम पर आध ररत कक ष -12 द व र : स ज व भद र य स न तक त त श क षक (स गणक शवज ञ न ) क ० शव० ब ब क (लखनऊ स भ ग) Data Structure एक data structure व व न न data types
Data Structures-I Linear Lists स ब एसई प ठ यक रम पर आध ररत कक ष -12 द व र : स ज व भद र य स न तक त त श क षक (स गणक शवज ञ न ) क ० शव० ब ब क (लखनऊ स भ ग) Data Structure एक data structure व व न न data types
ड ० र क लल डल द व च त अ ग र ज प स तक The Purpose क ह द अन व द क अगल भ ग ल खक ड ० र क लल डल अन व दक ड ० अननल ड ड अध य य 7[गत क स आग ] क र ध ध, ज डर और
![ड ० र क लल डल द व च त अ ग र ज प स तक The Purpose क ह द अन व द क अगल भ ग ल खक ड ० र क लल डल अन व दक ड ० अननल ड ड अध य य 7[गत क स आग ] क र ध ध, ज डर और](/thumbs/88/116264500.jpg "ड ० र क लल डल द व च त अ ग र ज प स तक The Purpose क ह द अन व द क अगल भ ग ल खक ड ० र क लल डल अन व दक ड ० अननल ड ड अध य य 7[गत क स आग ] क र ध ध, ज डर और") ड ० र क लल डल द व च त अ ग र ज प स तक The Purpose क ह द अन व द क अगल भ ग ल खक ड ० र क लल डल अन व दक ड ० अननल ड ड अध य य 7[गत क स आग ] क र ध ध, ज डर और उत स कत स प द ह त ह, एक ग ण भ वन ह. यह अक सर तब उत
ड ० र क लल डल द व च त अ ग र ज प स तक The Purpose क ह द अन व द क अगल भ ग ल खक ड ० र क लल डल अन व दक ड ० अननल ड ड अध य य 7[गत क स आग ] क र ध ध, ज डर और उत स कत स प द ह त ह, एक ग ण भ वन ह. यह अक सर तब उत
PowerPoint Presentation
 Classification वग करण Father of classification Carl Linnaeus Hierarchy of classification Classification of Organisms जन त जगत क वग करण Biologists, such Ernst Haeckel (1894) Robert Whittaker (1959) Carl
Classification वग करण Father of classification Carl Linnaeus Hierarchy of classification Classification of Organisms जन त जगत क वग करण Biologists, such Ernst Haeckel (1894) Robert Whittaker (1959) Carl
jktLFkku uxjikfydk fof/k;ka ¼fujlu vkSj iqu%izorZu½
 2019 क व ध यक स. 5 र जस थ न स स क रस स स स स ध धनव व ध यक2 2019 ज स कक र जस थ न स व ध न स स प र:र स थ वरक ककय ज य व र जस थ न क र रस क क स न यन स, 2 011क र र क श न त ररन र ल ए व,र भ रत गणर ज, र नन तरर ष
2019 क व ध यक स. 5 र जस थ न स स क रस स स स स ध धनव व ध यक2 2019 ज स कक र जस थ न स व ध न स स प र:र स थ वरक ककय ज य व र जस थ न क र रस क क स न यन स, 2 011क र र क श न त ररन र ल ए व,र भ रत गणर ज, र नन तरर ष
ब क ऑफ बड़ द - म र द ब द क ष त र क अपन श ख, ई ल ब व ए. ट. एम. ह त भ तल पर त य र भवन क आवश यकत ह भवन म ख य म ग प ग त दशग न य ह भवन क आवश यकत न न न र ह क
 ब क ऑफ बड़ द - म र द ब द क ष त र क अपन श ख, ई ल ब व ए. ट. एम. ह त भ तल पर त य र भवन क आवश यकत ह भवन म ख य म ग प ग त दशग न य ह भवन क आवश यकत न न न र ह क र.. स थ न क रप ट क ष त र (व ग फ ट) 1 आ शय न क ठ र
ब क ऑफ बड़ द - म र द ब द क ष त र क अपन श ख, ई ल ब व ए. ट. एम. ह त भ तल पर त य र भवन क आवश यकत ह भवन म ख य म ग प ग त दशग न य ह भवन क आवश यकत न न न र ह क र.. स थ न क रप ट क ष त र (व ग फ ट) 1 आ शय न क ठ र
vukj] vkWoyk] csj ,oa uhacw esa [kkn ,oa moZjdksa ds mi;ksx dk le;] ,oa ek=k
![vukj] vkWoyk] csj ,oa uhacw esa [kkn ,oa moZjdksa ds mi;ksx dk le;] ,oa ek=k](/thumbs/88/116284300.jpg "vukj] vkWoyk] csj ,oa uhacw esa [kkn ,oa moZjdksa ds mi;ksx dk le;] ,oa ek=k") ब र, अन र, न ब एव आ वल उद य न म ख द एव उववरक द न क समय एव म त र ड. द पक क म र सर ललय 1 एव ड. नर न द र क म र प र क 2 ड. द पक क म र सर ललय, वररष ठ व ज ञ ननक (उद य न) भ.क.अन.प.-क न द र य श ष क ब गव न स स
ब र, अन र, न ब एव आ वल उद य न म ख द एव उववरक द न क समय एव म त र ड. द पक क म र सर ललय 1 एव ड. नर न द र क म र प र क 2 ड. द पक क म र सर ललय, वररष ठ व ज ञ ननक (उद य न) भ.क.अन.प.-क न द र य श ष क ब गव न स स
पश ओ क ल ए प ष ट क एव सन त ल त आह र ड. ब.एस. म ण, प रध न व ज ञ ननक, (ड र प रस र) भ.क.अन.प.-र टर य ड र अन स ध न स स थ न करन, , हररय ण म ब ई : 094
 भ.क.अन.प.-र टर य ड र अन स ध न स स थ न करन, , हररय ण म ब ई : 094") पश ओ क ल ए प ष ट क एव सन त ल त आह र ड. ब.एस. म ण, प रध न व ज ञ ननक, (ड र प रस र) भ.क.अन.प.-र टर य ड र अन स ध न स स थ न करन, 132001, हररय ण म ब ई : 09466242194 ईम - bmeena65@gmail.com अन य ज वध र य क त
पश ओ क ल ए प ष ट क एव सन त ल त आह र ड. ब.एस. म ण, प रध न व ज ञ ननक, (ड र प रस र) भ.क.अन.प.-र टर य ड र अन स ध न स स थ न करन, 132001, हररय ण म ब ई : 09466242194 ईम - bmeena65@gmail.com अन य ज वध र य क त
1. न र द श: न म ल ख त स ख य श र म क व एक पर द ग त ह 2 P a g e ग त पर द ज ञ त कर 26, 37, 50, 63, 82 A. 26 B. 37 C. 82 D. 63 E. इ म स क ई ह 2. न र द श:
 1. न र द श: न म ल ख त सख य श र म क व एक पर द ग त ह 2 P a g e ग त पर द ज ञ त कर 26, 37, 50, 63, 82 A. 26 B. 37 C. 82 D. 63 E. इ म स क ई ह 2. न र द श: न म ल ख त सख य शर म प रश च ह (?) क स थ पर क य आय ग?
1. न र द श: न म ल ख त सख य श र म क व एक पर द ग त ह 2 P a g e ग त पर द ज ञ त कर 26, 37, 50, 63, 82 A. 26 B. 37 C. 82 D. 63 E. इ म स क ई ह 2. न र द श: न म ल ख त सख य शर म प रश च ह (?) क स थ पर क य आय ग?
1 P a g e
 1 P a g e 1. न र द श: न म ल ख त सख य श र म क व एक पर द ग त ह ग त पर द ज ञ त कर 26, 37, 50, 63, 82 A. 26 B. 37 C. 82 D. 63 E. इ म स क ई ह 2. न र द श: न म ल ख त सख य शर म प रश च ह (?) क स थ पर क य आय ग?
1 P a g e 1. न र द श: न म ल ख त सख य श र म क व एक पर द ग त ह ग त पर द ज ञ त कर 26, 37, 50, 63, 82 A. 26 B. 37 C. 82 D. 63 E. इ म स क ई ह 2. न र द श: न म ल ख त सख य शर म प रश च ह (?) क स थ पर क य आय ग?
PowerPoint Presentation
 Indian Banking System Banking In India Structure of banking sector in India. Co-operative bank anyonya cooperative bank in vadodura in Gujarat. Works on No profit no loss basis Monetary policy refers to
Indian Banking System Banking In India Structure of banking sector in India. Co-operative bank anyonya cooperative bank in vadodura in Gujarat. Works on No profit no loss basis Monetary policy refers to
Template PI
 Information for patients after an epidural or spinal anaesthetic द ढ त न क क ऊपर क भ ग म (एपपड य रल) य र ढ म (स प इ ल) स न कर व ल दव क ब द र गगय क ललए स च सर जर और स न न करन व ल दव ए र ग स चन पत र क द
Information for patients after an epidural or spinal anaesthetic द ढ त न क क ऊपर क भ ग म (एपपड य रल) य र ढ म (स प इ ल) स न कर व ल दव क ब द र गगय क ललए स च सर जर और स न न करन व ल दव ए र ग स चन पत र क द
इन फ स प रस क र 2015 प रद न करन क अव र पर भ रत क र ष ट रपतत, श र प रणब म खर ज क असभभ षण नई द ल ल : 13 फरवर, म प रत भ श ल ल ग क इस सम ह क ब च उ
 इन फ स प रस क र 2015 प रद न करन क अव र पर भ रत क र ष ट रपतत, श र प रणब म खर ज क असभभ षण नई द ल ल : 13 फरवर, 2016 1. म प रत भ श ल ल ग क इस सम ह क ब च उपस थ ह न म प रसन न ह म इन फ ससस प रथक र क ववज ओ क म
इन फ स प रस क र 2015 प रद न करन क अव र पर भ रत क र ष ट रपतत, श र प रणब म खर ज क असभभ षण नई द ल ल : 13 फरवर, 2016 1. म प रत भ श ल ल ग क इस सम ह क ब च उपस थ ह न म प रसन न ह म इन फ ससस प रथक र क ववज ओ क म
हम चल द श त रहव वध न सभ (ष ट स ) ल खत उ र ह त न स मव र, 26 अग त, 2019/4 भ पद, 1941(श ) ---- [म य म - सच ई एव जन व य म - श म - शहर वक स म - क ष म - व य
 ल खत उ र ह त न स मव र, 26 अग त, 2019/4 भ पद, 1941(श ) ---- [म य म - सच ई एव जन व य म - श म - शहर वक स म - क ष म - व य") हम चल द श त रहव वध न सभ (ष ट स ) ल खत उ र ह त न स मव र, 26 अग त, 2019/4 भ पद, 1941(श ) [म य म - सच ई एव जन व य म - श म - शहर वक स म - क ष म - व य एव प रव र क य ण म - म ण वक स एव प च यत र ज म - उ ग म -
हम चल द श त रहव वध न सभ (ष ट स ) ल खत उ र ह त न स मव र, 26 अग त, 2019/4 भ पद, 1941(श ) [म य म - सच ई एव जन व य म - श म - शहर वक स म - क ष म - व य एव प रव र क य ण म - म ण वक स एव प च यत र ज म - उ ग म -
PowerPoint Presentation
 Pie chart given below shows total number of workers in three different companies. Table given below shows ratio between officers and workers working in these companies. Study the data carefully and answer
Pie chart given below shows total number of workers in three different companies. Table given below shows ratio between officers and workers working in these companies. Study the data carefully and answer
PowerPoint Presentation
 Fundamental Rights (Part-III) ARTICLE 21 : PROTECTION OF LIFE AND PERSONAL LIBERTY No person shall be deprived of his life or personal liberty except according to procedure established by law. Article
Fundamental Rights (Part-III) ARTICLE 21 : PROTECTION OF LIFE AND PERSONAL LIBERTY No person shall be deprived of his life or personal liberty except according to procedure established by law. Article
Python एक शुरुआत सीबीएसई पाठ्यक्रम पर आधारित कक्षा -11
 Program Efficiency or Idea of Algorithm Efficiency स ब एसई प ठ यक रम पर आध ररत कक ष -12 द व र : स ज व भद र य स न तक त त श क षक (स गणक शवज ञ न ) क ० शव० ब ब क (लखनऊ स भ ग) Algorithm एक algorithm ककस व व
Program Efficiency or Idea of Algorithm Efficiency स ब एसई प ठ यक रम पर आध ररत कक ष -12 द व र : स ज व भद र य स न तक त त श क षक (स गणक शवज ञ न ) क ० शव० ब ब क (लखनऊ स भ ग) Algorithm एक algorithm ककस व व
BIRLA INDUSTRIAL & TECHNOLOGICAL MUSEUM
 षवज ञ पन स ख य : 03/2015 सम च रपत र क न म: ब ड ल औद य ग क तथ प र द य ग क स ग रह लय, (र ष ट र य व ज ञ न स ग रह लय पररषद ) 19ए, र सदय र ड, क लक त 700 019 ************************************************
षवज ञ पन स ख य : 03/2015 सम च रपत र क न म: ब ड ल औद य ग क तथ प र द य ग क स ग रह लय, (र ष ट र य व ज ञ न स ग रह लय पररषद ) 19ए, र सदय र ड, क लक त 700 019 ************************************************
DigiTrak F5 Quick Start Guide (QSG) - Hindi
 - Hindi") ब टर व स ररयल न बर F5 स टम तवररत प र र भ म गटदलशटक प वर च ल ररस वर 1. ब टर प क इ स ट ल कर और ट र गर क एक स क ड क ललए दब ए रख 2. च त वन स र न स व क र करन क ललए ट र गर क ललक कर 3. स ट टअप स र न म ग ल ब चचह
ब टर व स ररयल न बर F5 स टम तवररत प र र भ म गटदलशटक प वर च ल ररस वर 1. ब टर प क इ स ट ल कर और ट र गर क एक स क ड क ललए दब ए रख 2. च त वन स र न स व क र करन क ललए ट र गर क ललक कर 3. स ट टअप स र न म ग ल ब चचह
Restitution Program: Information for Offenders Brochure - Chinese
 क षत प र प र ग र म: अपरर धक र त ओ क ल ए जर नकर र RESTITUTION PROGRAM: Information for Offenders [Hindi] यद आप पर क स क षत प र ऑर डर (Restitution Order) क प स क द नदर र ह, र सहर र र उपलब ध ह क षत प र क
क षत प र प र ग र म: अपरर धक र त ओ क ल ए जर नकर र RESTITUTION PROGRAM: Information for Offenders [Hindi] यद आप पर क स क षत प र ऑर डर (Restitution Order) क प स क द नदर र ह, र सहर र र उपलब ध ह क षत प र क
Slide 1
 एक न तत क अध क र र पर ख सत र 1: पररचय ग पन यत क य ह? अ तरर ष ट र य उपकरण म ग पन यत स स क ततय और स दर भ म ग पन यत चच सत र 2: ग पन यत, इ टरन ट और आईस ट ग पन यत क श ए च न ततय ग पन यत पर इ टरन ट और आईस ट क
एक न तत क अध क र र पर ख सत र 1: पररचय ग पन यत क य ह? अ तरर ष ट र य उपकरण म ग पन यत स स क ततय और स दर भ म ग पन यत चच सत र 2: ग पन यत, इ टरन ट और आईस ट ग पन यत क श ए च न ततय ग पन यत पर इ टरन ट और आईस ट क
कम-स -कम य ज य द -स -ज य द व व क म हत कह ज त ह क एक ग रत स ब क द खकर न य टन क ग र त व कषरण क सद ध त नक लन क प र रण मल थ अग र य ब त सच ह त ह सकत ह क ऊप
 कम-स -कम य ज य द -स -ज य द व व क म हत कह ज त ह क एक ग रत स ब क द खकर न य टन क ग र त व कषरण क सद ध त नक लन क प र रण मल थ अग र य ब त सच ह त ह सकत ह क ऊपर क ओर उछ ल ग ई एक ग द य स ब क ग त क द खकर उन ह न यह
कम-स -कम य ज य द -स -ज य द व व क म हत कह ज त ह क एक ग रत स ब क द खकर न य टन क ग र त व कषरण क सद ध त नक लन क प र रण मल थ अग र य ब त सच ह त ह सकत ह क ऊपर क ओर उछ ल ग ई एक ग द य स ब क ग त क द खकर उन ह न यह
Microsoft Word ii.rtf
 RSS/1X/2.40/ The House re-assembled after lunch at forty-two minutes past two of the clock, MR. DEPUTY CHAIRMAN in the Chair. ---- MOTION RE: TERMINATION OF SUSPENSION OF MEMBER THE MINISTER OF STATE IN
RSS/1X/2.40/ The House re-assembled after lunch at forty-two minutes past two of the clock, MR. DEPUTY CHAIRMAN in the Chair. ---- MOTION RE: TERMINATION OF SUSPENSION OF MEMBER THE MINISTER OF STATE IN
Afzal Husain Tally ERP 9 Complete Course TALLY ERP 9 COURSE क हम श र आत कर च क ह और य पहल PART ह ज स स RELATED NOTES म आपक PDF म द रह ह NOTES म द गई ह
 TALLY ERP 9 COURSE क हम श र आत कर च क ह और य पहल PART ह ज स स RELATED NOTES म आपक PDF म द रह ह NOTES म द गई हर INFORMATION क आपक ध य न स पढन ह य NOTES आपक BASIC COURSE क समझन क जलए और HELP कर ग त श र करत
TALLY ERP 9 COURSE क हम श र आत कर च क ह और य पहल PART ह ज स स RELATED NOTES म आपक PDF म द रह ह NOTES म द गई हर INFORMATION क आपक ध य न स पढन ह य NOTES आपक BASIC COURSE क समझन क जलए और HELP कर ग त श र करत
 द श : डडज टल स क षरत अभ य न म डय ल 3: ईम ल और स शल म डडय 2 प ठ य न म डय ल 3 क भलए प ठ य न : 1. ईम ल क अवल कन और पररचय 2. हम ईम ल क उपय ग क य करत ह? 3. हम ईम ल आईड क स बन त ह, ईम ल ख त बन न क ललए 7 आस न
द श : डडज टल स क षरत अभ य न म डय ल 3: ईम ल और स शल म डडय 2 प ठ य न म डय ल 3 क भलए प ठ य न : 1. ईम ल क अवल कन और पररचय 2. हम ईम ल क उपय ग क य करत ह? 3. हम ईम ल आईड क स बन त ह, ईम ल ख त बन न क ललए 7 आस न
99DOTS क ग इड 99DOTS ट ब क इल ज क न गर और अ प ल क ललए एक कम ल गत व ल तक क ह इस वततम ड ट स क र तक रम क अ प रक क तरह उपर ग ककर ज त ह इसम मर ज द व र ल गई
 99DOTS क ग इड 99DOTS ट ब क इल ज क न गर और अ प ल क ललए एक कम ल गत व ल तक क ह इस वततम ड ट स क र तक रम क अ प रक क तरह उपर ग ककर ज त ह इसम मर ज द व र ल गई, प रनतद क ड ज़ क र स भ न गर स भव ह प रत र क ट ब -ववर
99DOTS क ग इड 99DOTS ट ब क इल ज क न गर और अ प ल क ललए एक कम ल गत व ल तक क ह इस वततम ड ट स क र तक रम क अ प रक क तरह उपर ग ककर ज त ह इसम मर ज द व र ल गई, प रनतद क ड ज़ क र स भ न गर स भव ह प रत र क ट ब -ववर
ट ल स चन प रण ल उपय गकर ननयम वल (ज ल ई 2014)
") ट ल स चन प रण ल (ज ल ई 2014) ववषयसच अध य य 1 प रस त वन... 3 1.1 प स स तक क ब म... 3 1.2 स क ष प त र प... 3 अध य य 2 उपय र कत ग म र गदर गक... 4 2.1 म ख य प ष ट ठ... 4 2.2 म नध त र प ट ल प ल ज़ ) (... 5 2.2.1
ट ल स चन प रण ल (ज ल ई 2014) ववषयसच अध य य 1 प रस त वन... 3 1.1 प स स तक क ब म... 3 1.2 स क ष प त र प... 3 अध य य 2 उपय र कत ग म र गदर गक... 4 2.1 म ख य प ष ट ठ... 4 2.2 म नध त र प ट ल प ल ज़ ) (... 5 2.2.1
Microsoft Word - VII-Hindi- QP
 ATOMIC ENERGY EDUCATION SOCIETY Anushaktinagar, Mumbai Summative Assessment Examination-2 Academic year- 2014-15 Class- VII Subject Hindi Time 2 hours 30 minutes Maximum Marks 90 Instructions 1. Marks
ATOMIC ENERGY EDUCATION SOCIETY Anushaktinagar, Mumbai Summative Assessment Examination-2 Academic year- 2014-15 Class- VII Subject Hindi Time 2 hours 30 minutes Maximum Marks 90 Instructions 1. Marks
THE INDIAN COMMUNITY SCHOOL (KHAITAN) KUWAIT ह द - ब कक ष -X (final exam sample paper) अध कतम अ क : 80 ध र त समय : 3 घ ट क ल प ष ठ: 05 इस प रश न पत र
 KUWAIT ह द - ब कक ष -X (final exam sample paper) अध कतम अ क : 80 ध र त समय : 3 घ ट क ल प ष ठ: 05 इस प रश न पत र") THE INDIAN COMMUNITY SCHOOL (KHAITAN) KUWAIT ह द - ब कक ष -X (final exam sample paper) अध कतम अ क : 80 ध र त समय : 3 घ ट क ल प ष ठ: 05 इस प रश न पत र क च र ख ड - 'क', 'ख','ग' और 'घ' च र खण ड क प रश न क
THE INDIAN COMMUNITY SCHOOL (KHAITAN) KUWAIT ह द - ब कक ष -X (final exam sample paper) अध कतम अ क : 80 ध र त समय : 3 घ ट क ल प ष ठ: 05 इस प रश न पत र क च र ख ड - 'क', 'ख','ग' और 'घ' च र खण ड क प रश न क
#4 SUCCESS KEY98 1.The virtual image of the real object is formed? व स तववक वस त क आभ स प रततबब ब बनत ह? (A) In convex mirror/उत तल दर पण म (B) from p
 In convex mirror/उत तल दर पण म (B) from p") #4 SUCCESS KEY98 1.The virtual image of the real object is formed? व स तववक वस त क आभ स प रततबब ब बनत ह? (A) In convex mirror/उत तल दर पण म (B) from plane mirror/ समतल दर पण स (C) In concave mirror/ अवतल
#4 SUCCESS KEY98 1.The virtual image of the real object is formed? व स तववक वस त क आभ स प रततबब ब बनत ह? (A) In convex mirror/उत तल दर पण म (B) from plane mirror/ समतल दर पण स (C) In concave mirror/ अवतल
Visit for Ncert Solutions in Text and Video, CBSE Sample papers, Exam tips, NCERT BOOKS, Motivational Videos, Note
 Visit for Ncert Solutions in Text and Video, CBSE Sample papers, Exam tips, क न द र य व द य लय स गठन,ह दर ब द स भ ग-15 सत र 2013-14 स कललत पर क ष -2 कक ष - छठ प र क - 60 व षय - हहन द द समय 2½ घ ट स म न
Visit for Ncert Solutions in Text and Video, CBSE Sample papers, Exam tips, क न द र य व द य लय स गठन,ह दर ब द स भ ग-15 सत र 2013-14 स कललत पर क ष -2 कक ष - छठ प र क - 60 व षय - हहन द द समय 2½ घ ट स म न
भ रत य प रब ध स स थ न इ द र भत अधधस चन स. 03/2018 क व रण न म ल ख त पद पर स ध भत क ल ए ऑ इ आव द आम त र त ककए ज त ह : क र. पद क म पद प रक र व त स तर आय
 भ रत य प रब ध स स थ न इ द र भत अधधस चन स. 03/2018 क व रण न म ल ख त पद पर स ध भत क ल ए ऑ इ आव द आम त र त ककए ज त ह : क र. पद क म पद प रक र व त स तर आय श र ण स. क स ख य (स तव आय ग)/ व त स म सम ककत म लसक
भ रत य प रब ध स स थ न इ द र भत अधधस चन स. 03/2018 क व रण न म ल ख त पद पर स ध भत क ल ए ऑ इ आव द आम त र त ककए ज त ह : क र. पद क म पद प रक र व त स तर आय श र ण स. क स ख य (स तव आय ग)/ व त स म सम ककत म लसक
स ल यक (Coeliac) र ग क य ह? आप स ल यक क स ब लत ह? स ल ई अक स ल यक र ग क अर थ ह कक आप लस (ग ल ट न) व ल भ जन नह ख सकत लस ग ह, र ई, ज और जई म ह त ह यद आप
 र ग क य ह? आप स ल यक क स ब लत ह? स ल ई अक स ल यक र ग क अर थ ह कक आप लस (ग ल ट न) व ल भ जन नह ख सकत लस ग ह, र ई, ज और जई म ह त ह यद आप") स ल यक (Coeliac) र ग क य ह? आप स ल यक क स ब लत ह? स ल ई अक स ल यक र ग क अर थ ह कक आप लस (ग ल ट न) व ल भ जन नह ख सकत लस ग ह, र ई, ज और जई म ह त ह यद आप लस क स वन करत ह, त इसस आप ब म र अन भव कर ग लस ककस
स ल यक (Coeliac) र ग क य ह? आप स ल यक क स ब लत ह? स ल ई अक स ल यक र ग क अर थ ह कक आप लस (ग ल ट न) व ल भ जन नह ख सकत लस ग ह, र ई, ज और जई म ह त ह यद आप लस क स वन करत ह, त इसस आप ब म र अन भव कर ग लस ककस
भ रत य जनत प र ट (क द र य क य लय) 11, अश क र ड, नई द ल ल फ न: , फ क स: Salient Points of Speech by BJP National Pres
 11, अश क र ड, नई द ल ल फ न: , फ क स: Salient Points of Speech by BJP National Pres") भ रत य जनत प र ट (क द र य क य लय) 11, अश क र ड, नई द ल ल - 110001 फ न: 011-23005700, फ क स: 011-23005787 Salient Points of Speech by BJP National President Amit Shah Addressing a Press Conference in Mumbai
भ रत य जनत प र ट (क द र य क य लय) 11, अश क र ड, नई द ल ल - 110001 फ न: 011-23005700, फ क स: 011-23005787 Salient Points of Speech by BJP National President Amit Shah Addressing a Press Conference in Mumbai
MergedFile
 A GOVERNMENT RECOGNISED MINORITY INSTITUTION Dated: 19-07-2019 ADMISSION NOTICE The selected candidates of U.G. Part I (B.A. I, B.Sc. (Bio.) I, B.Sc. (Maths) I & B.Com. I) in First list are informed that
A GOVERNMENT RECOGNISED MINORITY INSTITUTION Dated: 19-07-2019 ADMISSION NOTICE The selected candidates of U.G. Part I (B.A. I, B.Sc. (Bio.) I, B.Sc. (Maths) I & B.Com. I) in First list are informed that
Slide 1
 Digital Financial Awareness and Access Redefining governance स चन प र द य ग क ज ञ न क न द र (IT-GK) ड ज टल श क ष और प रश क षण क स व ध उपलब ध कर न क शलए एकल ब द म ड य ल ह. इस पररय न क सफल क य न द यन क शलए
Digital Financial Awareness and Access Redefining governance स चन प र द य ग क ज ञ न क न द र (IT-GK) ड ज टल श क ष और प रश क षण क स व ध उपलब ध कर न क शलए एकल ब द म ड य ल ह. इस पररय न क सफल क य न द यन क शलए
The Five Generations of Computers in Hindi Language क प य टर स क प च प ढ य क उनक आक र, ब जल, प र म म र, ल गत और आव दन क ललए क प य टर प र द य गगक क र म
 The Five Generations of Computers in Hindi Language क प य टर स क प च प ढ य क उनक आक र, ब जल, प र म म र, ल गत और आव दन क ललए क प य टर प र द य गगक क र मग र ववक र क र प म वर णसत ककय ज र कत ह क प य टर क पहल
The Five Generations of Computers in Hindi Language क प य टर स क प च प ढ य क उनक आक र, ब जल, प र म म र, ल गत और आव दन क ललए क प य टर प र द य गगक क र मग र ववक र क र प म वर णसत ककय ज र कत ह क प य टर क पहल
1) श र ज एस वर ड वर ष -2014, वर ष ) श र पदमज त सस ह वर ष 2014, वर ष 2015 द व र म ग गए आरट आई आव दन पत र क जव ब आरट आई, ब ब एमब (ल क प र ध करण) न
 श र ज एस वर ड वर ष -2014, वर ष ) श र पदमज त सस ह वर ष 2014, वर ष 2015 द व र म ग गए आरट आई आव दन पत र क जव ब आरट आई, ब ब एमब (ल क प र ध करण) न") 1) श र ज एस वर ड वर ष -2014, वर ष 2015 2) श र पदमज त सस ह वर ष 2014, वर ष 2015 द व र म ग गए आरट आई आव दन पत र क जव ब आरट आई, ब ब एमब (ल क प र ध करण) न ट: ब ब एमब ल क प र ध क र स सम बन ध आरट आई रर नम नल
1) श र ज एस वर ड वर ष -2014, वर ष 2015 2) श र पदमज त सस ह वर ष 2014, वर ष 2015 द व र म ग गए आरट आई आव दन पत र क जव ब आरट आई, ब ब एमब (ल क प र ध करण) न ट: ब ब एमब ल क प र ध क र स सम बन ध आरट आई रर नम नल
ASSEMBLY MANUAL अन द श ग इड
 ASSEMBLY MANUAL अन द श ग इड Scan QR code for assembly instructions and operation videos अन द श व डय द खन क लए QR क ड क न कर 1800-2-66-55-66 SKUtro Toll Free Helpline ट ल हक स व Congratulations! You are
ASSEMBLY MANUAL अन द श ग इड Scan QR code for assembly instructions and operation videos अन द श व डय द खन क लए QR क ड क न कर 1800-2-66-55-66 SKUtro Toll Free Helpline ट ल हक स व Congratulations! You are
NEWELL BRANDS
 NEWELL BRANDS 1 Newell Brands और इसक स यक क पन य और स य ग (स म ह क र प स, "न य ल") व य स नयक नतकत क उच चतम म क क स थ व य स नयक गनतव ध य और सभ ल ग क और व न यम क अ स र स च ल कर क ललए प रनतबद य व क र त आचरण
NEWELL BRANDS 1 Newell Brands और इसक स यक क पन य और स य ग (स म ह क र प स, "न य ल") व य स नयक नतकत क उच चतम म क क स थ व य स नयक गनतव ध य और सभ ल ग क और व न यम क अ स र स च ल कर क ललए प रनतबद य व क र त आचरण
Umschlag_2013•••.indd
 FREDinserat.indd 1 30.09.09 08:59 A R T INER M I W S mme: 2cm x 2cm ~ ACHTUNG! WARNING! ATENCION! AVERTISSEMENT! ATTENTIONE! ATENÇAO! DE MESIO! WAARSCHUWINGEN! ADVARSEL!! VY STRAHA!! OPOZORILO! UWAGA!
FREDinserat.indd 1 30.09.09 08:59 A R T INER M I W S mme: 2cm x 2cm ~ ACHTUNG! WARNING! ATENCION! AVERTISSEMENT! ATTENTIONE! ATENÇAO! DE MESIO! WAARSCHUWINGEN! ADVARSEL!! VY STRAHA!! OPOZORILO! UWAGA!
ISSN भ रत य भ ष ओ क अ तर ष ट र य म स क श ध पत र क 17 जनवर 2014 ववद य र थ य म न क कड न ट क क प रभ ववत क स व स य ज गर कत क न दभ म अध ययन *ड.लक
 ववद य र थ य म न क कड न ट क क प रभ ववत क स व स य ज गर कत क न दभ म अध ययन *ड.लक ष मण सश द, **र घव न र ह रम ड *उप च य, सशक ष अध ययनश ल, द व अटहल य ववश वववद य लय, इन द र, भ रत **व य ख य त, सशक ष अध ययनश ल,
ववद य र थ य म न क कड न ट क क प रभ ववत क स व स य ज गर कत क न दभ म अध ययन *ड.लक ष मण सश द, **र घव न र ह रम ड *उप च य, सशक ष अध ययनश ल, द व अटहल य ववश वववद य लय, इन द र, भ रत **व य ख य त, सशक ष अध ययनश ल,
आव दन स ब ध एफएक य GIRLS FIRST FUND अन द न आव दन पत र क ब र म अक सर प छ ज न व ल प रश न ववषयवस त Contents 1. प ज करण प त रत अन द न स ब
 आव दन स ब ध एफएक य GIRLS FIRST FUND अन द न आव दन पत र क ब र म अक सर प छ ज न व ल प रश न ववषयवस त Contents 1. प ज करण... 1 2. प त रत... 1 3. अन द न स ब ध ज नक र... 4 4. आव दन पत र... 5 5. स प क स चन... 7
आव दन स ब ध एफएक य GIRLS FIRST FUND अन द न आव दन पत र क ब र म अक सर प छ ज न व ल प रश न ववषयवस त Contents 1. प ज करण... 1 2. प त रत... 1 3. अन द न स ब ध ज नक र... 4 4. आव दन पत र... 5 5. स प क स चन... 7
1 झ रखण ड सरक र व ध व भ ग छ ट न गप र क श तक र अध ननयम 1908 (स श न) व यक 2016
 व यक 2016") 1 झ रखण ड सरक र व ध व भ ग छ ट न गप र क श तक र अध ननयम 1908 (स श न) व यक 2016 2 छ ट न गप र क श तक र अध ननयम 1908 (स श न) व यक 2016 व षय स च ध र (1) स क ष प त न म, व स त र ए प र र भ (2) छ ट न गप र क श तक
1 झ रखण ड सरक र व ध व भ ग छ ट न गप र क श तक र अध ननयम 1908 (स श न) व यक 2016 2 छ ट न गप र क श तक र अध ननयम 1908 (स श न) व यक 2016 व षय स च ध र (1) स क ष प त न म, व स त र ए प र र भ (2) छ ट न गप र क श तक